前言
90年代中期出现的虚轴机床引起了整个机械制造业的关注,被称为是“本世纪机床设计的首次革命性变革”。这种机床实际是一种空间并联连杆机构,其基本结构是一个活动平台、一个固定平台和连接两个平台的六根连杆。不断改变六根杆的长度,活动平台便产生6自由度的空间运动,带动刀具在工件上加工出复杂的三维曲面。与传统机床相比,虚轴机床具有刚性高、精度高、运动速度高和机械结构简单等优点,但其不足之处是工作空间小于同等尺寸的传统机床。
麻花钻后刀面是复杂的三维曲面,而且刃磨钻尖时只需要很小的工作空间,所以在钻头刃磨机上采用虚轴机床的结构将是非常适宜的。本文将对在虚轴钻头刃磨机上刃磨圆锥面钻尖进行探讨。
1 机床结构的矢量表示
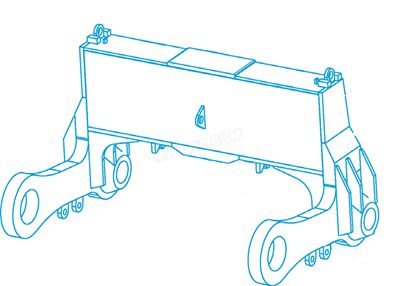
钻头刃磨机要使钻头相对于砂轮产生给定的三维运动,为此将钻头安装在活动平台上,砂轮安装在固定平台上。在固定平台上建立坐标系OBxByBzB,在活动平台上建立坐标系OPxPyPzP(图1)。各杆用矢量Li(i=1,2,…,6)表示,各杆与固定平台交点的位置用矢量Bi(i=1,2,…,6)表示,各杆与活动平台交点的位置用矢量Pi(i=1,2,…,6)表示,砂轮中心高用矢量h表示,砂轮中心至磨削点的半径用矢量r表示,被磨钻头悬伸部用矢量d表示(图1)。在给定结构下,Bi在OBxByBzB坐标系内和Pi在OPxPyPzP坐标系内分别为常矢量,记为BiB和PiP。
2 钻尖锥面磨法的磨削参数
磨削锥面钻头时,锥面、钻头、砂轮的初始相对位置见图2,控制这一相对位置的参数称为磨削参数。锥面钻尖的磨削参数有五个,其中q为锥面的半锥角,b为钻头主切削刃在钻头端截面内投影与xP轴夹角,f为锥轴线与zB轴夹角,H为锥顶到钻尖顶端距离在锥轴上的投影,d1为锥轴线与钻头轴线的距离。

图1 机床结构的矢量表示 图2 钻尖的锥面磨法原理图
图2中O′x′y′z′为锥面坐标系,z′为锥轴。锥面在O′x′y′z′坐标系中的方程是
x′2+y′2-z′2tg2q=0 (1)
Oxyz为钻头坐标系,利用坐标的平移和旋转可得到锥面在Oxyz坐标系中的方程为
 (2)
(2)
式2给出了磨削参数q、b、f、H、d1之间的关系,任选其中四个,就可求出第五个。故锥面磨削法有四个独立的磨削参数。一些文献中均推荐了q、f、H、d1作为独立磨削参数,需用四个独立的方程求出。这些方程实际是钻头几何参数和磨削参数的关系式,对于给定的钻头几何参数如半顶角、横刃斜角y、结构圆周后角afc等,可以得到相应的表达式,从而求出四个独立的磨削参数,然后由式2求出第五个磨削参数。这一过程在许多文献中均有介绍,此处不再赘述。

 超厚板数控火焰切割
超厚板数控火焰切割 铝合金薄壁零件加工
铝合金薄壁零件加工 “安全着陆”- 山特
“安全着陆”- 山特 科汇有关刀具重磨重
科汇有关刀具重磨重

